Sistemi di Governo
1. Premessa
L'interazione tra il flusso di un fluido e un corpo solido genera delle forze. Questo può accadere sia se è il corpo è fermo e viene investito dal flusso, e sia se il fluido è fermo è il corpo si muove all'interno di esso.
L'esempio più lampante è quello che quasi tutti da bambini abbiamo sperimentato mettendo una mano fuori dal finestrino, divertendoci ad inclinare il palmo in modi diversi e sentendo l'insorgere di queste forze (che spingevano la mano in alto o in basso).
L'impiego efficace di queste forze, per vari scopi, si ottiene dando al corpo solido una forma appropriata, che consenta di ottimizzare le forze che ci servono (es. portanza) minimizzando quelle che non ci servono (es. resistenza).
Una delle applicazioni più antiche di questo fenomeno è proprio legata all'uso di SUPERFICI DI GOVERNO applicate su corpi galleggianti in movimento al fine di influenzarne il comportamento. Il timone di una imbarcazione è certamente una di queste. In tempi più recenti, tale fenomeno ha consentito la nascita del volo aereo, grazie allo studio dei profili alari (che sostengono il velivolo in aria) e all'impiego delle superfici di governo (che consentono di controllare il volo).
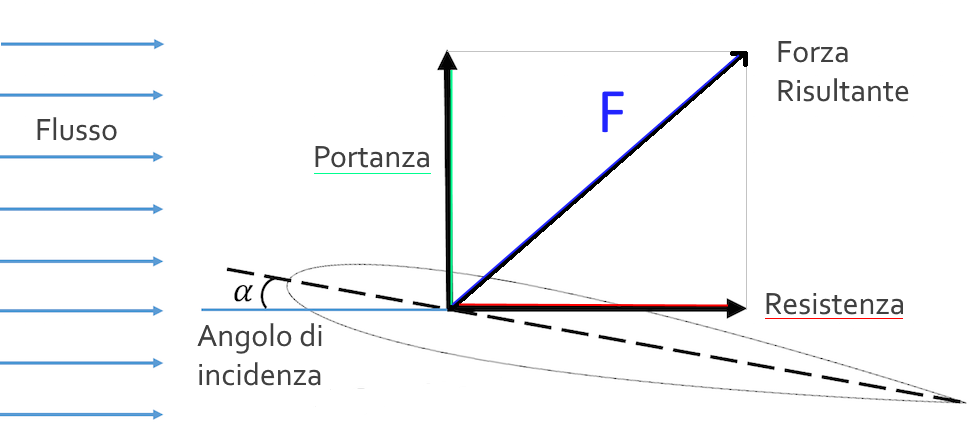
Le superfici di controllo più comunemente impiegate sono caratterizzate da un Profilo Simmetrico Biconvesso.
Vediamo come si comporta questa superficie quando ruota di un certo angolo rispetto alla direzione del flusso in cui è immersa (angolo di incidenza).
Come si osserva nella figura, nasce una forza F che, normalmente si preferisce scomporre nelle sue due compoenenti parallela e perpendicolare alla direzione del flusso. La componente perpedicolare si chiama PORTANZA, mentre quella parallela si chiama RESISTENZA. Se immaginiamo che quella in figura sia la sezione del timone di una nave (che si muove nel fluido alla velocità del flusso) è facile capire che la portanza è la forza che ci serve per manovrare la nave (dirigendola dove vogliamo), mentre la resistenza è solo una forza che si oppone al nostro moto (è un freno, e quindi energia che perdiamo).
Prescindendo dalla scomposizione di cui sopra, dobbiamo subito dire che l'intensità della forza F dipende direttamente dai seguenti fattori:
- Angolo di incidenza: come è facilmente intuibile, maggiore è l'angolo è maggiore sarà la forza (incrementa quindi la portanza ma anche la resistenza). Se il profilo dellla superficie di governo è simmetrico, portando questo angolo a zero, non avremo alcuna portanza (ma solo resistenza).
- Velocità del flusso: a maggiore velocità corrisponde maggiore forza; se la velocità è uguale a zero non si genera alcuna forza. Questo è il fattore più rilevante in quanto la forza cresce con il quadrato della velocità.
- Densità del fluido: a maggiore densità corrisponde maggiore forza. Nello spazio (ove sussiste il vuoto, e la densità è zero) una superficie di governo non serve a niente.
- Estensione della superfice: è evidente che con una maggiore superfice otterremo una forza maggiore.
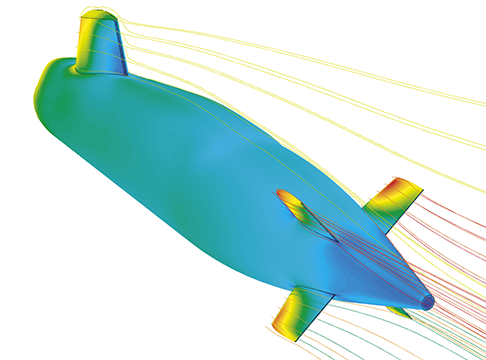
Il governo di un sommergibile sul piano orizzontale (rotta) e su quello verticale (quota) si ottiene mendiante varie superici di governo che adesso descriveremo. Oltre ai fattori sopra descritti, nell'ambito dei sommergibili è anche necessario studiare con particolare attenzione il posizionamento di queste superfici (al fine di ottimizzare la loro interazione con il flusso idrodinamico che scorre attorno al battello).

2. Superfici di Governo di un sommergibile
Partendo dalla solita condizione di equilibrio idrostatico tra peso e spinta (P=S - 11° Comandamento) e tenendo a mente che l'effetto propulsivo dell'elica è sempre quello di spingere il battello lungo la direzione del suo asse longitudinale, le superfici di governo di un sommergibile servono eclusivamente a generare temporaneamente delle forze in grado di fare ruotare il battello lungo i suoi assi principali, al fine di dargli una direzione (in alto, in basso, a destra o a sinistra) verso la quale la sua propulsione lo spingerà.
Normalmente i sommergibili sono dotati di superfici dedicate al governo sul piano orizzontale (rotta) e di altre superfici dedicate al governo sul piano verticale (quota). Le prime sono solitamente superfici verticali (come il timone di una nave) e sono normalmente posizionate nella zona poppiera del battello. Per il governo della quota si usano solitamente superfici di governo orizzontali che sono posizionate sia a prora che a poppa dell'unità.
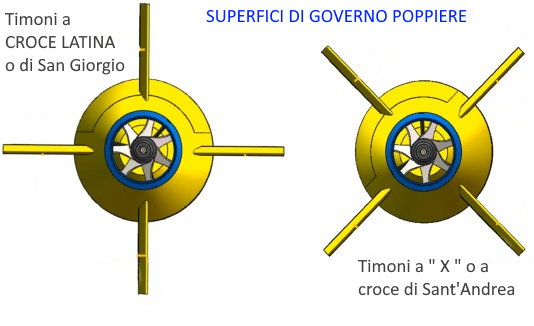
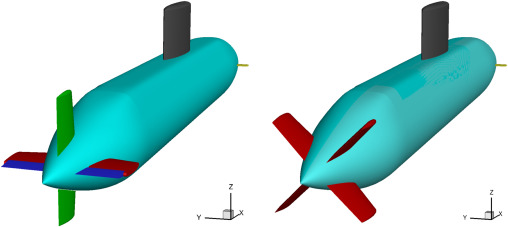
Per quanto riguarda la zona poppiera, quella che ho descritto sopra è la configurazione che prevede le superfici di governo poppiere disposte secondo la cosiddetta CROCE LATINA o Croce di San Giorgio. Come sappiamo, esiste anche un'altra configuazione cossiddetta a "X" o a Corce di Sant'Andrea.
Nel caso della Croce Latina è facile capire che la coppia di TIMONI ORIZZONTALI di poppa (TT.OO.AD) vengono impiegati solo per le variazioni di quota, mentre la coppia di TIMONI VERTICALI (TT.VV.) funge le classiche funzioni di timone per la gestione della rotta. In questa configurazione le coppie di timoni si muovono insieme e vengono mosse da un unico attuatore idrauilco; uno muove la coppia dei TT.OO.AD. e l'altro muove la coppia dei TT.VV.
La soluzione a "X" è spesso preferita per alcune sue particolari caratteristiche che la rendono più efficace e sicura. Prevede infatti che i 4 timoni possano muoversi indipendentemente ed ognuno di loro è dotato di un proprio attuatore idraulico. La combinazione contemporanea dell'azione delle 4 superfici consente varie manovre e produce le forze necessarie. Normalmente, tuttavia, si usa impiegare i due timoni in basso per gestire la rotta, e i due timoni in alto per gestire la quota. Oltre ad un vantaggio di tipo idrodinamico (in termini di resistenza al moto e rumore del flusso turbolento) il vero vantaggio è in termini di sicurezza e ridondanza (la perdita di una delle 4 superfici, per un avaria al relativo attuatore ad esempio, può essere facilmente gestita continuando ad operare le altre 3). Nella soluzione a croce latina, se perdi uno dei due attuatori perdi l'azione di una coppia di timoni (Verticali o Orizzontali) e rischi di perdere il controllo del battello.

3. Governo sul piano orizzontale (ROTTA)
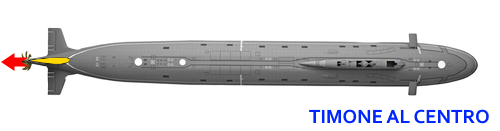
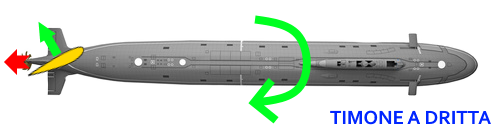
Consta sulla classica azione del timone delle navi; le apposite superfici di governo poppiere (a croce o a "x") quando vengono azionate generano delle forze orizzontali che provocano la rotazione del batello attorno all'asse verticale (moto di imbardata).
Partiamo dalla condizione di timone al centro e, ovviamente, battello in movimento grazie all'azione della propulsione (se fosse fermo, il timone non genererebbe alcuna forza). La vista delle immagini seguenti è ovviamente dall'alto.
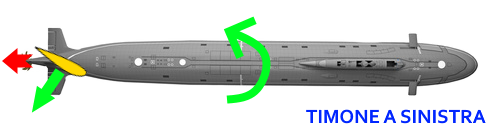
Per far virare il battelo a destra, dovrò agire sul timone in modo che generi una forza verso sinistra che mi farà ruotare il battello verso destra.
Identico discorso per la virata a sinistra.
Nota banale, ma imporante: fino a quando la superficie di governo sarà inclinata, l'azione del timone continuerà, così come continuerà l'accostata. Il battello continuerà a girare in cerchio, fino a quando il timone non sarà riportato al centro.
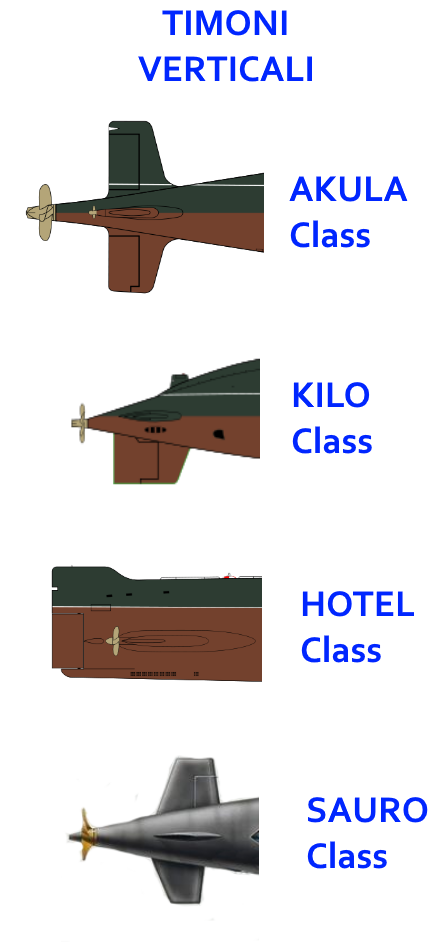
Segue una selezione di timoni verticali (a croce latina) installati su alcune note classi di sommergibili.
4. Governo sul piano verticale (QUOTA)
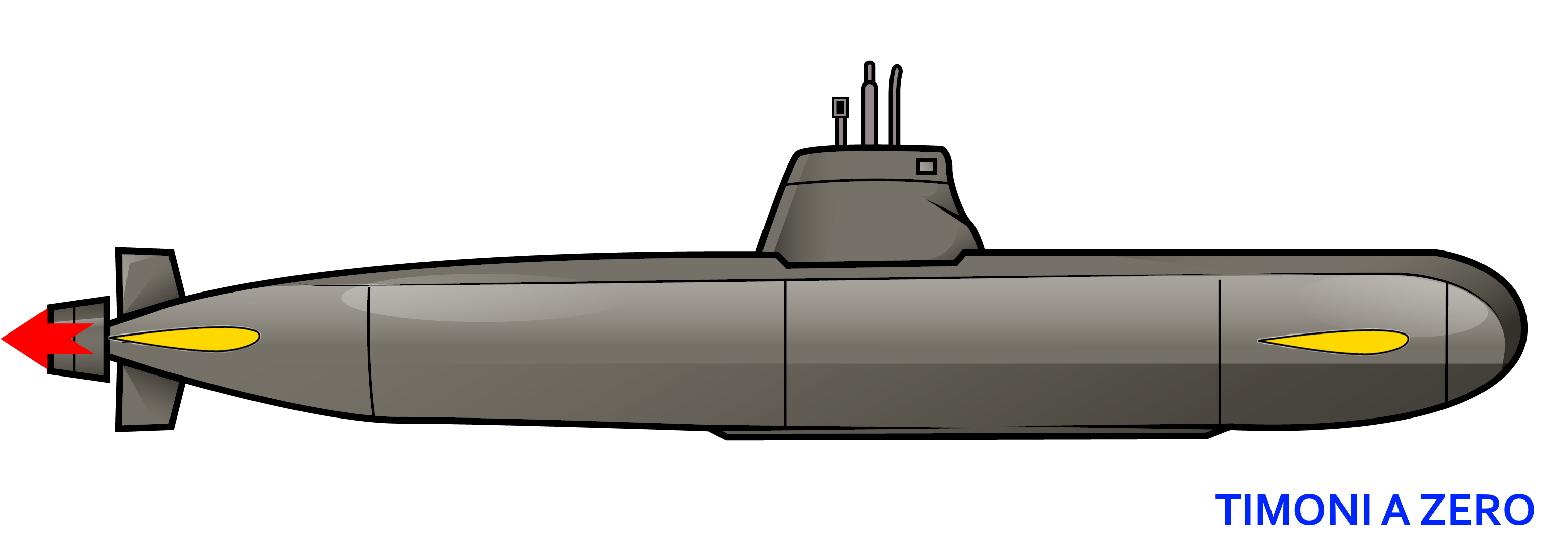
Per semplicità di rappresentazione, i disegni che seguono prevedono la soluzione poppiera con Croce Latina. Anche in questo caso partiamo da battello immerso, in moto grazie alla sua propulsione, in perfetto assetto e con P=S. In questa condizione, se teniamo i timoni orizzontali a zero, non succerà nulla e il battello navigherà alla sua quota.
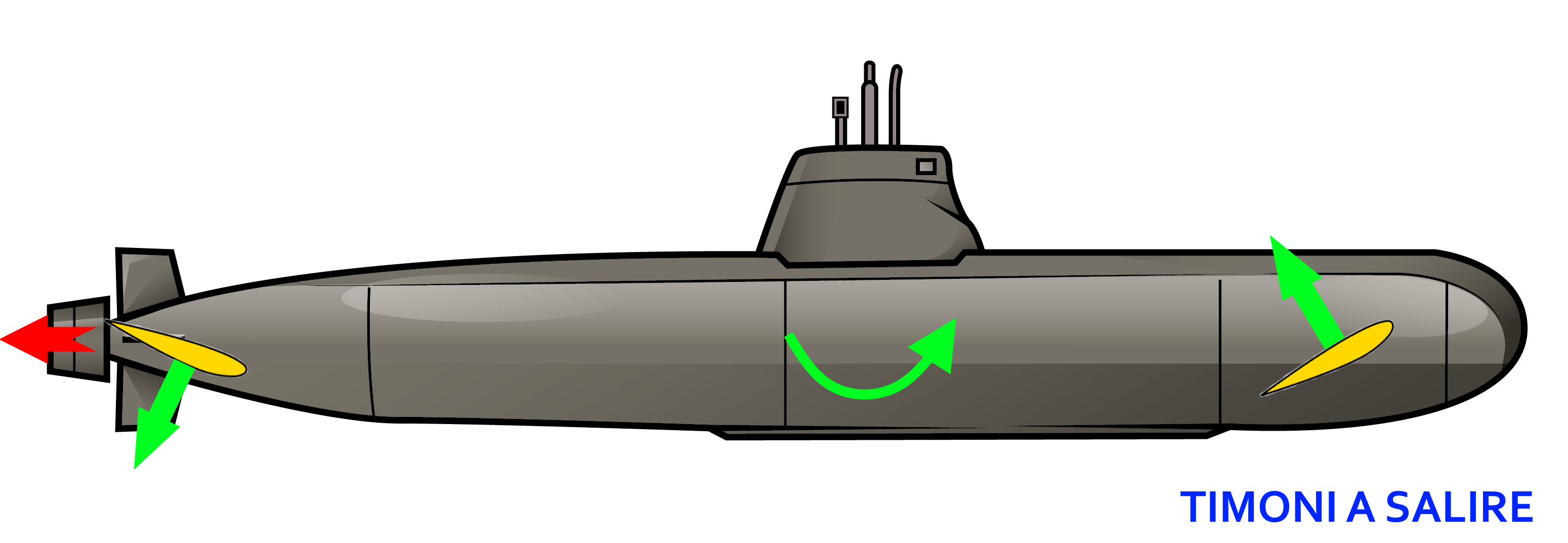
Se vogliamo salire per diminuire la quota, dovremo agire sui timoni al fine di ottenere un appoppamento del battello. Dovremo quindi generare un momento apppoppante che vada a perturbare l'equilibrio dritto vigente.
Il momento appoppante che si genera farà ruotare il battello in senso antiorario.
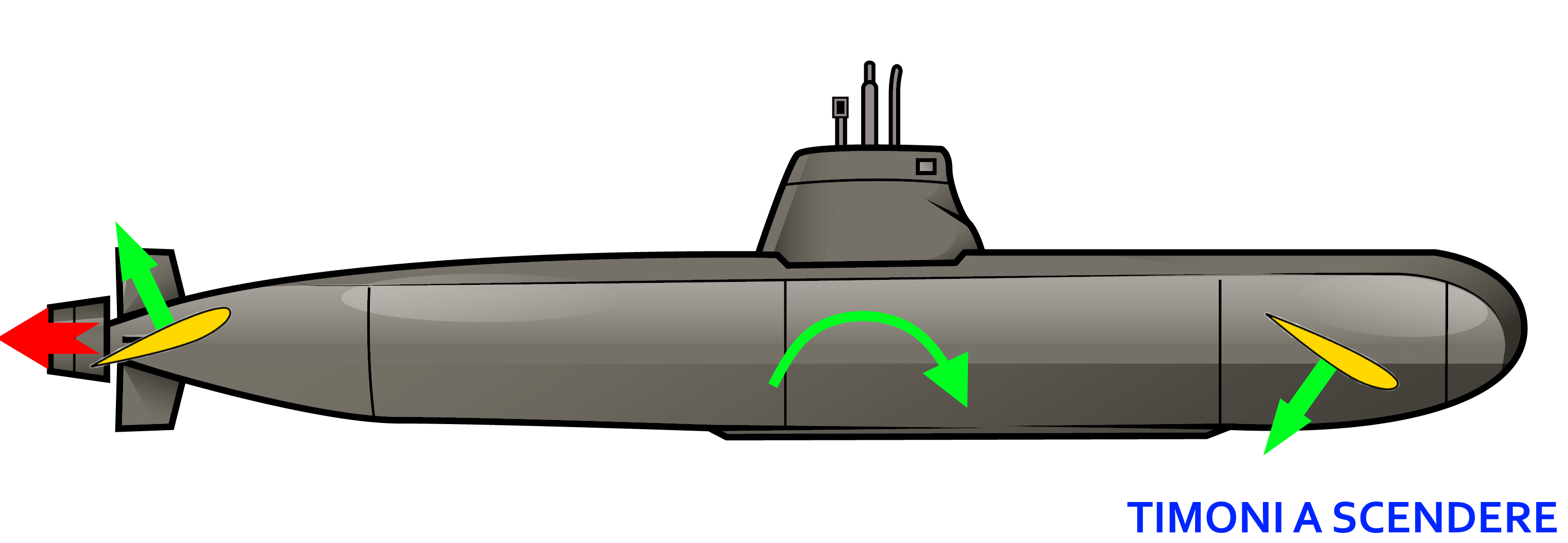
Vale un identico discorso se vogliamo incrementare la nostra quota agendo sui timoni al fine di generare un momento appruante.
Il momento appruante farà ruotare il battello in senso orario.
Ma fino a quando durerà la rotazione ? Continuerà a ruotare come nel caso dei timoni verticali ? O si fermerà ad un certo angolo ?
La rotazione cesserà quando il momento appruante o appoppante, provocato dall'azione dei timoni orizzontali, sarà eguagliato dal MOMENTO DI STABILITA' LONGITUDINALE che contestualmente cercherà di raddrizzare il battello.
Si crea così un equilibrio di momenti che terrà il battello inclinato fino a quando i timoni non verranno riportati a zero. In questa condizione la spinta propulsiva dell'elica farà variare la quota del sommergibile (a scendere o a salire).
Quando avremo raggiunto la quota desiderata riporteremo i timoni a zero e il momento di stabilità longitudinale ripoterà il battello in condizione dritta (bolla a zero) ristabilendo la condizione di equilibrio iniziale.
Durante queste manovre, l'equilbrio statico P=S non è mai stato alterato.
Non è quindi affatto vero che, in condizioni normali, per variare la quota di un sommergibile è necessario imbarcare o sbarcare acqua di zavorra (per variare il proprio peso). Questa operazione viene svolta solo in condizioni operative molto particolari che richiedono al battello di restare completamente fermo (e stando fermo, come abbiamo detto, i timoni non possono generare alcuna forza).
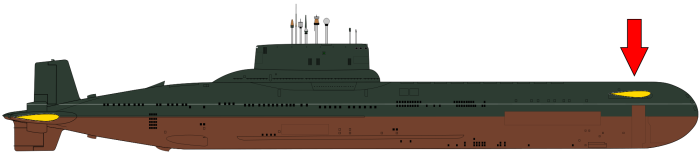
5. Superfici orizzontali di governo sulla vela. Perchè ?
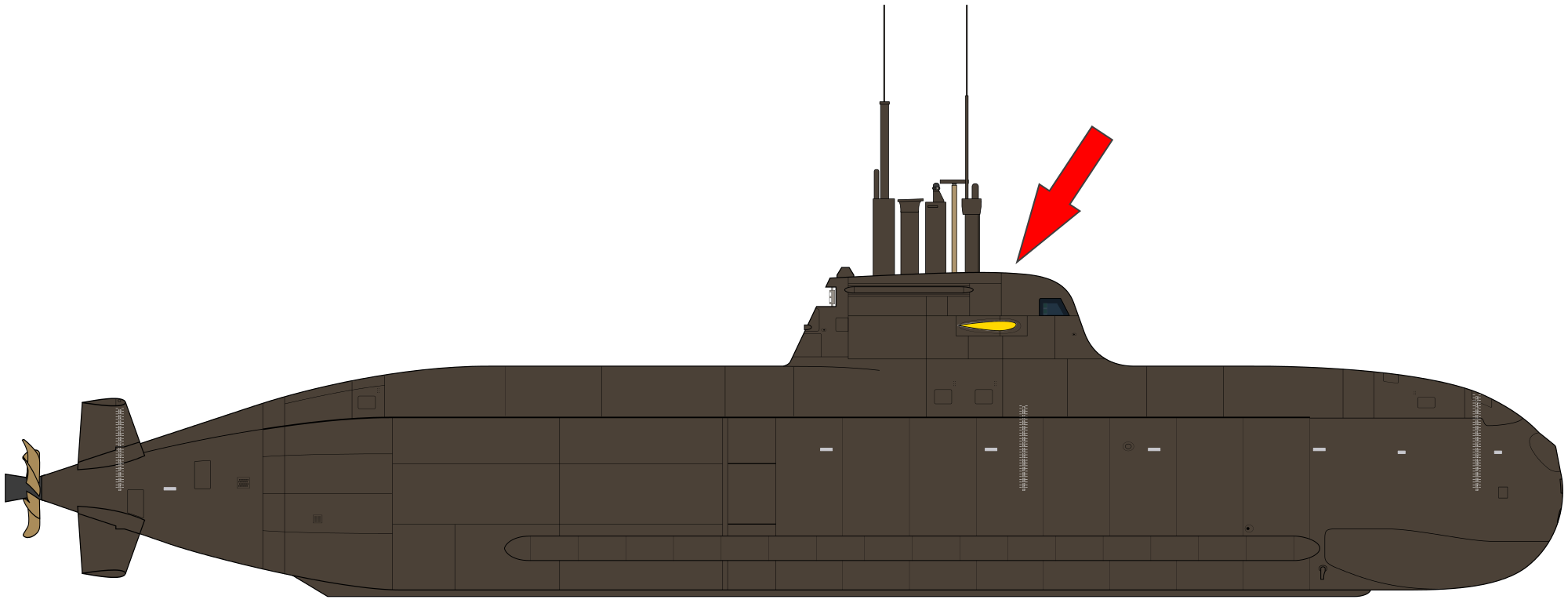
Sappiamo che i Timoni orizzontali di prora, in alcuni casi vengono posizionati sulla vela del sommergibile. E' così, ad esempio, anche per i battelli classe SAURO e per quelli Tipo U212A.
Alla luce di quanto abbiamo detto, le superfici di governo prodiero saranno più efficaci quanto più saranno lontane dal baricentro (per provocare i momenti appoppanti e eppruanti che servono) e quindi starebbero bene nella zona più prodiera della scafo, come nel caso del disegno seguente (TYPHOON Class).
Sull'estrema propra di tutti i sommergibili è sempre posizionato il principale sensore SONAR; è un trasduttore elettroacustico progettato per cogliere rumori sommersi fino a decine di miglia di distanza. Posizionado una coppia di timoni nei suoi pressi provochiamo certamente un grave disturbo, considerando che i timoni generano non poco rumore (sia meccanico che fluodinamico).
Per ovviare a questo grave problema, da molti anni si cerca allontanare detti timoni dal sonar prodiero, posizionandoli sulla vela. A livello progettuale, questa soluzione ha costretto i progettisti a spostare la vela molto in avanti e, conseguentemente anche la camera manovra (che normalmente è posta sotto alla vela, in corrispondenza dei periscopi).


2024
- Giampiero Ranieri
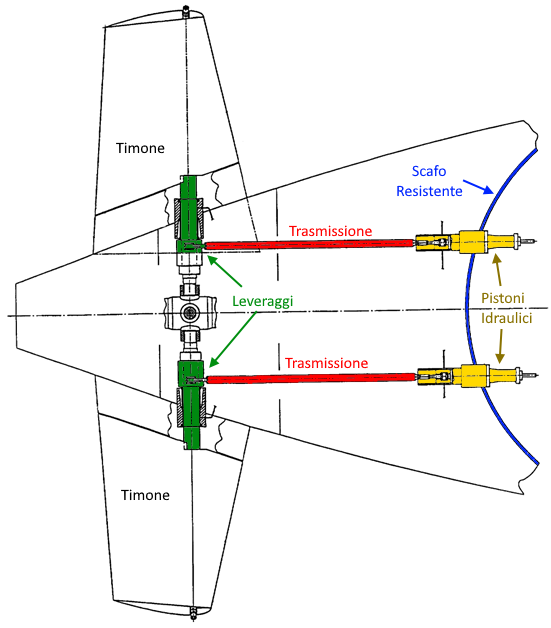
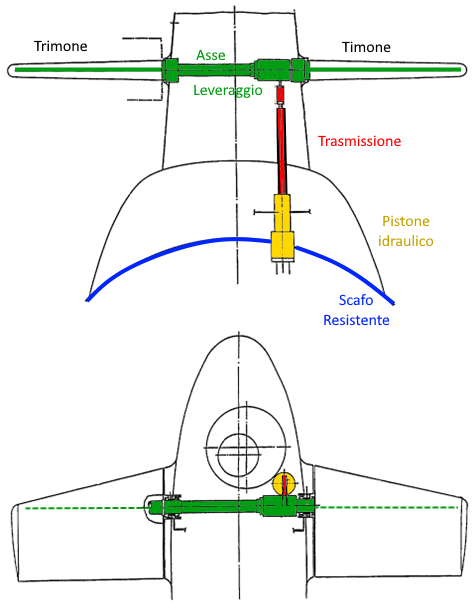
6. Azionamento dei timoni
Ogni superficie di governo (pala di un timone orizzontale, verticale o a "X") è comunemente mossa da un attuatore idraulico alimentato dall'impianto oleodinamico di bordo. Raramente troviamo attuatori elettrici per questo tipo scopo (per ragioni di sicurezza ed affidabilità). La posizione di un timone è quindi raggiunta mediante l'azionamento di un apposito attuatore (pistone idraulico a doppio effetto) comandato da un sistema remoto dotato di retroazione (feedback). Tali attuatori sono normalmente installati all'interno dello scafo resistente (o a cavallo dello stesso) e sono fisicamente collegati alla pala del timone attravero appositi leverismi meccanici ed aste di trasmissione, anche passanti attraverso lo scafo resistente (e quindi dotate di appositi sistemi di tenuta alla pressione esterna). Ove possibile, per sicurezza, si cerca di dotare ogni pala di timone di un proprio attuatore (come accade sui timoni poppieri nella configurazione ad "X", ove ogni pala è indipendente ed è dotata di un proprio attuatore); il alcuni casi un solo attuatore muove una coppia di timoni simmetrici (come accade spesso nella configurazione a "croce latina", per la coppia di timoni orizzontali e verticali, che si muovono sempre insieme, e che non avrebbero alcun motivo per essere mossi in maniera indipendente).
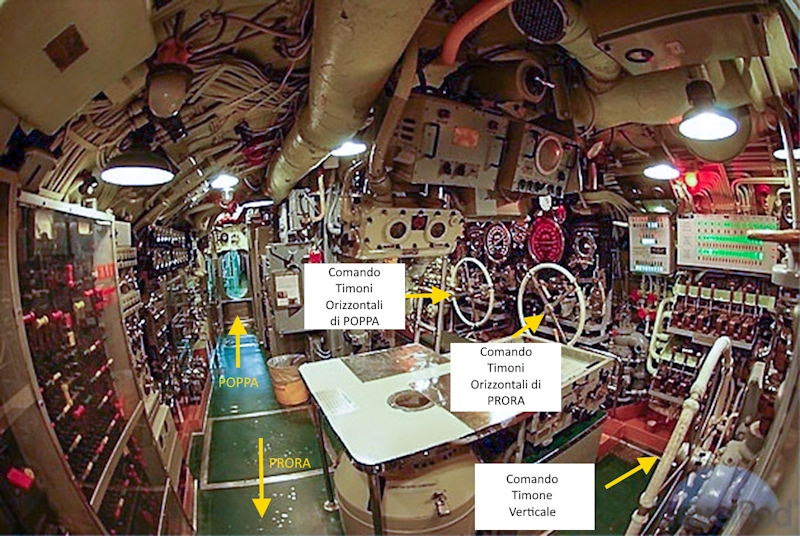
7. Controllo dei timoni
Il comando e il controllo di un sottomarino si esercita dalla Camera Manovra (Control Room); è quindi evidente che anche la postazione di controllo dei timoni sia ubicata in detto locale. E' così da sempre ! In passato, sui battelli costruiti fino agli anni '70, ogni gruppo di timoni veniva comandanto da un operatore; esisteva quini un addetto al controllo della rotta (che gestiva i timoni verticali), e due operatori per il controllo della quota (uno per i timoni orizzontali poppieri e un altro per i timoni orizzontali prodieri). Il timoniere verticale svolgeva un compito identico a quello che svolge il timoniere di una nave di superficie; i due timonieri addetti alla quota, avevano un compito più complesso, in quanto dovevano operare in modo sempre coordinato e sincronizzato (cosa che richiedeva maggiore addestramento e un elevato affiatamento).
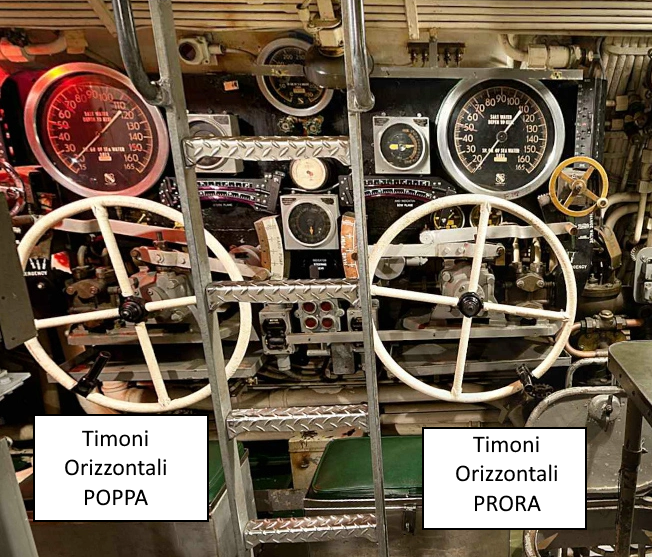
Non potendo vedere fuori, i timonieri avevano la necessità di vari strumenti per per svolgere il loro compito. Il timoniere verticale doveva avere davanti agli occhi una bussola, al fine di mantenere la rotta ordinata dall'Ufficiale in Comando.
I timonieri orizzontali avevano vita meno facile, in quanto avevano il compito di mantenere e/o raggiungere la quota ordinata. Cosa non affatto facile, specie a quote basse (quota periscopica) e con mare agitato. Per farlo dovevano avere contezza della quota (profondimetro), dell'assetto longitudinale (bolla), dell'angolo di inclinazione del proprio timone e della velocità del battello (con basse velocità occorre inclinare notevolmente i timoni; ad alte velocità è necessario e sufficiente operare con pochi gradi di inclinazione).
Il loro compito era quello di generare volutamente un disassetto longitudinale del battello (a salire o a scendere) in modo da consentire all'elica di propulsione di spingere il battello verso quote minori o maggiori. Quindi operavano insieme al fine di generare la rotazione del battello, e una volta raggiunta la quota ordinata, dovevano continuamente correggere l'angolo dei timoni per mantenerla.
Un lavoro di squadra che richiedeva un elevato affiatamento dei due operatori e, sopratutto, un buon dosaggio del battello, costantemente inseguito dall'Ufficiale all'assetto (utilizzando l'impianto di assetto e compenso).
La situazione migliorò drasticamente a partire dagli anni '80, quando si diffuse la tecnologia mirata al cosiddetto "one man control". Vennerò infatti prodotte delle console ad operatore unico che, con una sorta di cloche aeronautica, potevano contemporaneamente governare la rotta e la quota. Contestualmente nacquero anche dei sistemi di automazione in grado di raggiungere e mantentere rotta e quota in modo automatico. Detti sistemi aiutarono nettamente il lavoro dei timonieri, anche se nessuna automazione può eguagliare l'istinto, la sensibilità e l'esperienza di un bravo timoniere umano.
I primi impianti erano di tipo elettromeccanico:

Negli anni successivi, già dalla fine degli anni '90 e fino ad oggi, si è passati a console completamente elettroniche, perfettamente integrate con i computers di bordo, dotate di strumenti digitali ed analogici e di moderni sistemi di automazione.

8. Sicurezza
Un'avaria all'impianto di governo è una delle circostanze più critiche temute dai sommergibilisti. Ritrovarsi con i timoni bloccati a scendere o, comunque, perdere il controllo della rotta e della quota, espone il battello a gravissimi rischi e può avere effetti letali. Il blocco meccanico dei timoni, o dei sistemi di trasmissione esterni allo scafo resistente o l'incatastamento degli attuatori oledonamici sono eventi molto rari (almeno in tempo di pace; potrebbero infatti derivare solo da esplosioni esterne o colisioni) a cui, purtroppo, è quasi impossibile porre rimedio in quanto si tratta di eventi non gestibili in mare dal personale di bordo, e in tempi adeguati.
Esistono invece soluzioni di emergenza che possono consentire la gestione di un'altra grave avaria che consiste nel mancato funzionalmento della console di governo, oppure nell'interruzione della comunicazione tra la stessa e gli attuatori idrauilici che muovono i timoni. Detta comunicazione può sussistere attraverso diversi canali indipendenti e ridondanti: vi sono più linee di comunicazione elettrica così come sistemi di comunicazione idraulica (utili in caso di black-out elettrico).
Esiste infine la possibilità di azionare gli attuatori idraulici direttamente dal locale in cui sono posizionati (bypassando completamente la console di governo), e sistemi "one shot" di estrema (e ultima) emergenza in grado di eseguire una sola manovra rivolta a riportare il timone a "zero" o a salire.